FIFO 设计笔记
Posted on 2015-10-02 22:13 in IC
FIFO 的重要性就不用再重复了,在笔试面试的时候也常常被问到,总结一下设计 FIFO 需要注意的问题。
FIFO 可以分为两类:
-
Sync FIFO: write 和 read 使用同一个时钟
-
Async FIFO: write 和 read 分别使用两个时钟
设计 FIFO 的时候,通常需要考虑的问题有:
-
FIFO 的大小
-
FIFO 空满的判断
Sync FIFO
Sync FIFO 的框图如下所示:

因为同步 FIFO 的读写速率是相同的,所以 FIFO 的大小设置不必考虑读写速率差这个因素,要简单很多。
在 FIFO 内部,一般使用 dual port RAM 存储数据。双端口 RAM 有两套独立的读写地址,读地址和写地址分别由读指针和写指针来产生:写指针指向下一个数据被写入的地址,读指针指向下一个被读出的数据的地址,通过判断读写指针的相对大小,就可以得到 FIFO 的状态(full / empty)。
还有另外一种方法来产生 full / empty 信号:FIFO 内部维护一个计数器,每次写入一个数据 cnt++,每次读出一个数据 cnt--。这种方法产生 full / empty 很简单:当 cnt == 0,表示 FIFO empty;当 cnt == max,表示 FIFO full。虽然这种方法产生 full / empty 很简单,但是需要额外的计数器,而且计数器的位宽随着 FIFO 的深度增加,不仅占用的资源更多,而且会降低 FIFO 最终可以达到的速度。
Async FIFO
一般异步 FIFO 的读写速率不同,如果写速度 > 读速度,则当数据量超过一定长度时,会出现溢出的情况,为了防止这种情况,可以采用两种措施:
-
预先知道写速率和模式(burst / nonburst),最小的读速率,根据这些条件设置 FIFO 的深度
通常发送端的数据都是突发的形式,FIFO 的深度至少要大于等于突发数据的最大长度。
-
握手机制(full / empty)
很多情况下,突发数据的长度和分布是预先不知道的,此时则无法确保 FIFO 的深度足够大,因此需要握手机制来告诉发送端已经没有多余的空地址保存数据 or 告诉接收端已经内部已经没有剩余的可以读取的数据。通常使用如下的 FSM 来实现:
发送端,写数据:

接收端,读数据:

Gray Code
在异步 FIFO 中,因为一些内部的信号要从写 / 读时钟域传递到读 / 写时钟域,所以必须要解决异步信号同步的问题,而且有的信号不止 1 bit,如果使用 “ 同步桥 ”,则因为各个 bit 的同步时延不一定(1~2T),所以不能用同步桥。
这个问题可以使用 gray code 解决:gray code 是循环码,每次只有 1 bit 变化,这样就避免了多 bits 变化的数据同步问题。如下图:
gray code 与 binary code 的相互想换见另外一篇 blog。
wr-ptr / rd-ptr Sync Lag
异步 FIFO 还有个问题是:地址信号跨时钟域时,可能会有 1T 的时延,这个多余的时延并不会导致 full /empty 错误置位,引起错误的 overf:
-
如果地址信号传递到读时钟域时延时了 1T,此时接收端并不知道数据已经写入了 FIFO,仍然认为 FIFO 是空的,这种情况只会对 FIFO 的吞吐率 throughput 有影响,但是不会导致 underflow;
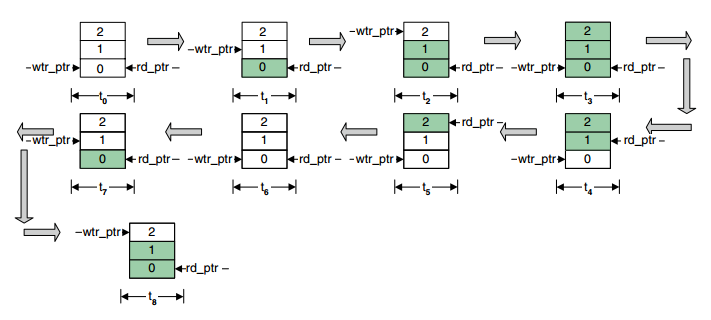
如下图,先写满 FIFO,然后开始读:在 t6 时 FIFO 读空,empty = 1,在 t7 时,写入了一个新数据,此时 FIFO 内已经有有效数据了,但是 wr-ptr 同步到读时钟域要花费 2T,所以在 t9 时 empty = 0。有两个时钟周期(t7, t8) rd 被阻塞了,但是并不影响 FIFO 正常工作。
时序图:

-
如果地址信号传递到写时钟域时延是了 1T,此时发送端并不知道 FIFO 已经有空余地址了,仍然认为 FIFO 是满的,这种情况也是只会对 FIFO 的吞吐率 throughput 有影响,但是不会导致 overfl;
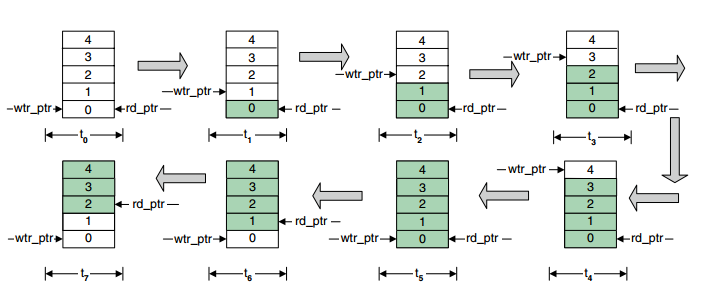
如下图,先写满 FIFO,然后开始读:在 t5 时,full = 1,在 t6 时,读出了一个数据,此时 FIFO 已经有空余地址了,但是 rd-ptr 同步到写时钟域要花费 2T,所以在 t8 时 full = 0。有两个时钟周期(t6, t7) wr 被阻塞了,但是并不影响 FIFO 正常工作。
时序图:

Full / Empty Generation
因为 wr-ptr 和 rd-ptr 相同时,FIFO 既可能是 full,也有可能是 empt,所以需要额外的 1 bit 来区别这两种情况:
假设 FIFO 的深度是 8,则地址为 3 bits,初始时 wr-ptr 和 rd-ptr 都是 0000,FIFO 此时是 empty:
-
当连续 8 个数据写入到 FIFO full,wr-ptr =
1000,而 rd-ptr =0000,MSB 不同,剩余位相同 -
当连续 8 次读取数据 FIFO empty,rd-ptr = wr-ptr =
1000,所有 bits 都相等
借助这多余的 1 bit,可以区分出是 wr-ptr 太快,将 rd-ptr 套圈了(wr-ptr = 1000,rd-ptr = 0000, 即 full),还是 rd-ptr 更快,追上了 wr-ptr(rd-ptr = wr-ptr = 1000)。
框图如下:

这种 wr-ptr / rd-ptr 用 gray code 保存,比较 /+1 用 binary 保存的方式,使得 design / debug 变得很简单,但是需要的资源比较多。如果全部使用 gray code,虽然可以降低资源占用,但是需要其他逻辑。
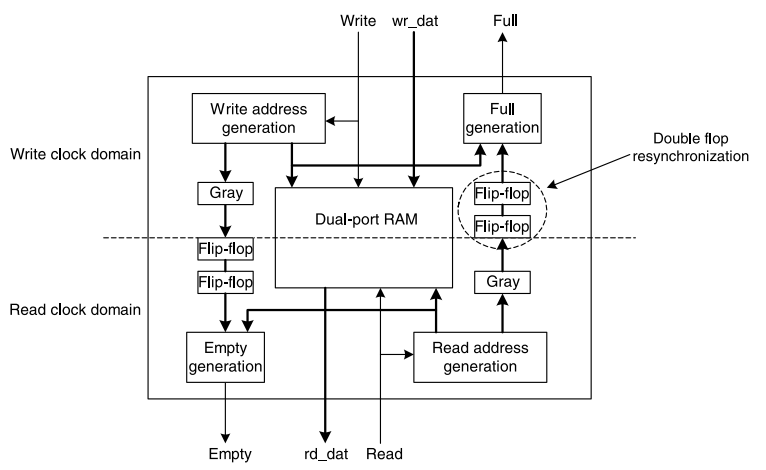
Dual Clock FIFO Design
下图是使用 Dual port RAM 的异步 FIFO 框图,其中 wr-ptr 和 rd-ptr 直接使用 gray code,节省了 gray code 和 binary code 之间的转换逻辑。

和前面的逻辑类似,使用多 1 bit 来辅助区分 full / empt,不过因为改成用 gray code 来比较,所以稍有不同,下图显示了 FIFO 从 empty 到 full 再到 empty 的过程:

-
FIFO empty
当 wr-ptr = rd-ptr 时 FIFO empty
-
FIFO full
如上图,FIFO 初始状态为 empty,然后连续写入 8 个数据,再读出 8 个数据,此时 wr-ptr = rd-ptr = 7,FIFO 又变为 empty。此时如果再写入一个数据,wr-ptr = 8,rd-ptr = 7,如果仍然使用前面介绍的方法(MSB 不同,剩余位相同 ),则会得出 FIFO full 的错误结论,实际上 FIFO 并没有满。
仔细观察 gray code 的对称性,就可以知道,当 full 时(wr-ptr 将 rd-ptr 套圈时),MSB 不同,wr-ptr 的 2nd MSB 要先翻转,才和 rd-ptr 相同。所以,当下面 3 个条件都满足时,FIFO full:
-
wr-ptr 和 rd-ptr 的 MSB 不相等
-
wr-ptr 的 2nd MSB 翻转后和 rd-ptr 的 2nd MSB 相等
-
剩余 bits 全部相等
-
Summary
总结 FIFO 的设计,只要注意 FIFO 通过 wr-ptr 和 rd-ptr 得到 full / empty,而且使用 gray code 来跨时钟域,基本上就没问题了 :-D
Ref
The Art of Hardware Architecture: Design Methods and Techniques for Digital Circuits
Advanced FPGA Design: Architecture, Implementation, and Optimization